I had a nightmare last night. The oscillogram of the phase2 clock (see previous post) turned into a nasty saw and cut the mainboard of my PET in half. I definitely should go and find the cause of this weird thingy that pretends to be a rising edge, but that investigation might take a while longer. To get on with the main project, I’ll mimic the PET’s own pragmatic way for a moment: Ignore! Business as usual!
Now that we have found the 6522 shift register working even at high speed, it should be suitable to transmit data to the CHRE. The PET also needs a way to check if the CHRE is ready to receive (more) data. We add a binary busy/ready signal and end up with a three wire connection:
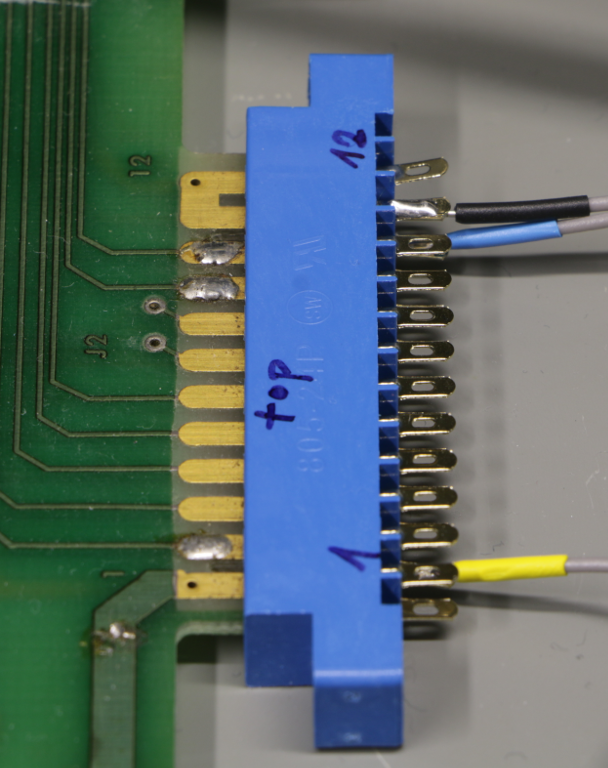
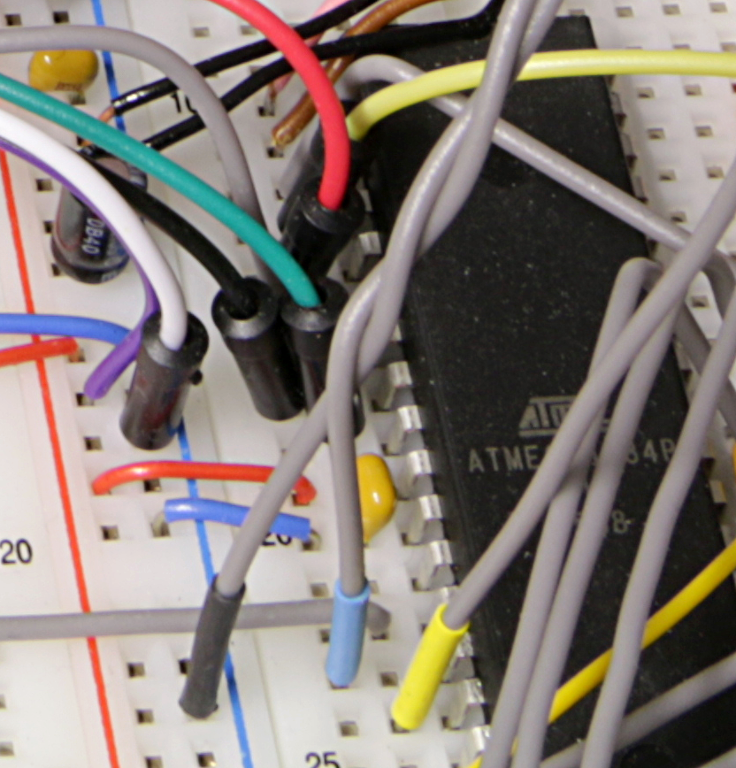
PET userport pin 11 <—-> CHRE ATmega pin 11, GND, black
PET userport pin M, —-> CHRE ATmega pin 14, DATA, blue
PET userport pin B, <—- CHRE ATmega pin 15, BUSY, yellow
Have you ever experienced the resolution cancellation phenomenon? No, I’m not talking about politics here. What I mean is: You start with the intention to write a serial communication protocol, but get distracted by some other code as soon as your IDE pops up? I went down the rabbit hole of performance optimization. Yes, I know the rule. Don’t optimize your code in an early stage! I just couldn’t resist.
To make a long story (aka coding&debugging session) short: The time to produce this demo output
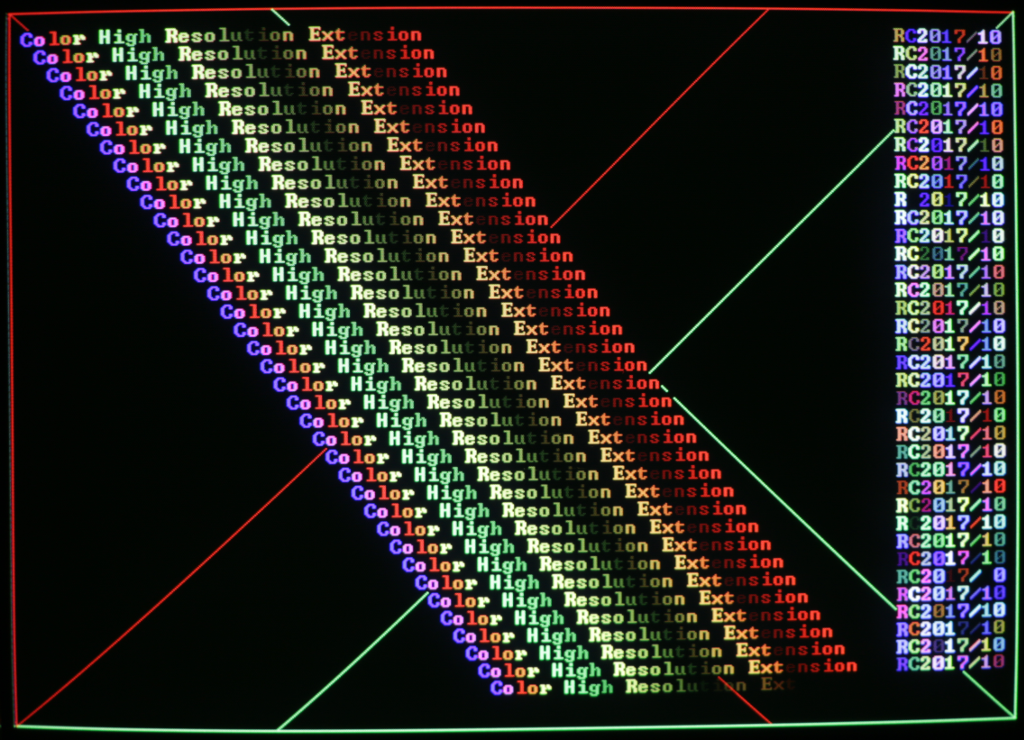
has been reduced from 10 minutes to 16 seconds. That’s still slow as a snail, but now it’s a snail on amphetamine! 😉
Provided that I did count accurate, the screen content is built up of 153,728 pixels. 153,728 pixels divided by 16 seconds equals 9,608 pixels per second. Back to serial communication: Drawing a single pixel is the most basic function the CHRE has to provide. And it’s the worst case in terms of the communication protocol as well: Only one pixel per function call. How many DrawPixel function calls can we transfer over the serial link at a bit rate of 250 kbit/s ?
A serial frame consists of one start bit, six data bits and one stop bit. Without further encoding, we would need seven frames:
1 frame function identifier (using 6 bits),
2 frames X coordinate (using only 10 bits out of 12),
2 frames Y coordinate (using only 9 bits out of 12),
2 frames color (using only 8 bits out of 12).
These seven frames correspond to 56 bits (start and stop bits included). So we can transfer 4,464 frames per second (250,000 divided by 56). That’s insufficient, isn’t it? Well, it depends.
The CHRE pixel rate is already very slow. The ATmega is currently using nearly all of its processing power to handle the framebuffer and do the rendering. We’ll have to steal some clock cycles from the rendering to implement a serial protocol, hence reduce the amount of pixels the CHRE can render per second. Another aspect is the real application. A few thousand pixels per second may be adequate if the PET does analysis of a math function and curve sketching. A 3D ego shooter is out of reach, though.
Coding time…